 |
 |
 |
 |
 |
|
|
|
|
|
|
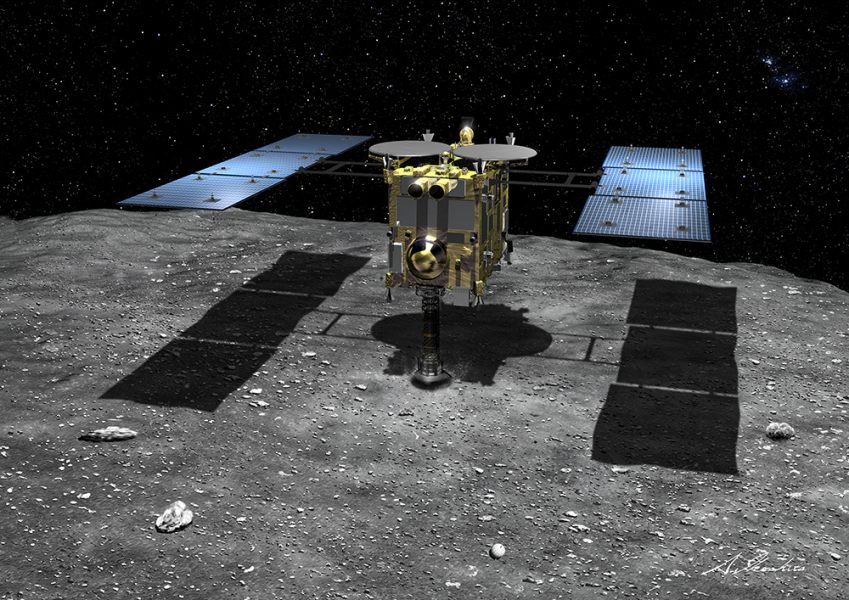
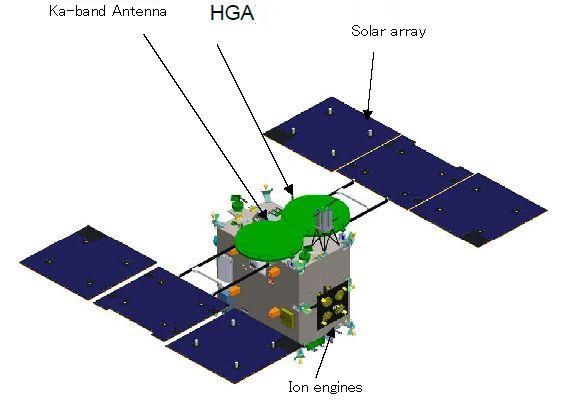
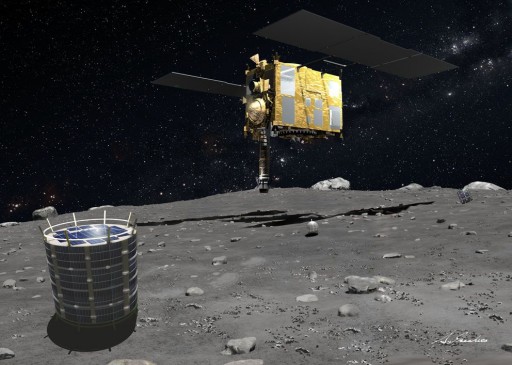
Japoński próbnik (nazwa oznacza sokoła), którego celem jest dostarczenie próbek gruntu z planetki 1999JU3 Ryugu (typ C, średnica ok. 920 metrów).
Rakieta nośna H-2A (202). Start z wyrzutni LP1 kompleksu startowego Yoshinobu na kosmodromie Tanegashima, wraz z sondami technologicznymi PROCYON i Shin'en-2 oraz rzeźbą DESPATCH.
Masa startowa 590 kg, w tym około 100 kg materiałów pędnych.
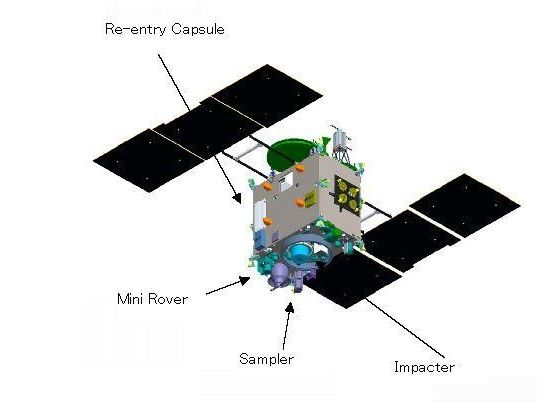
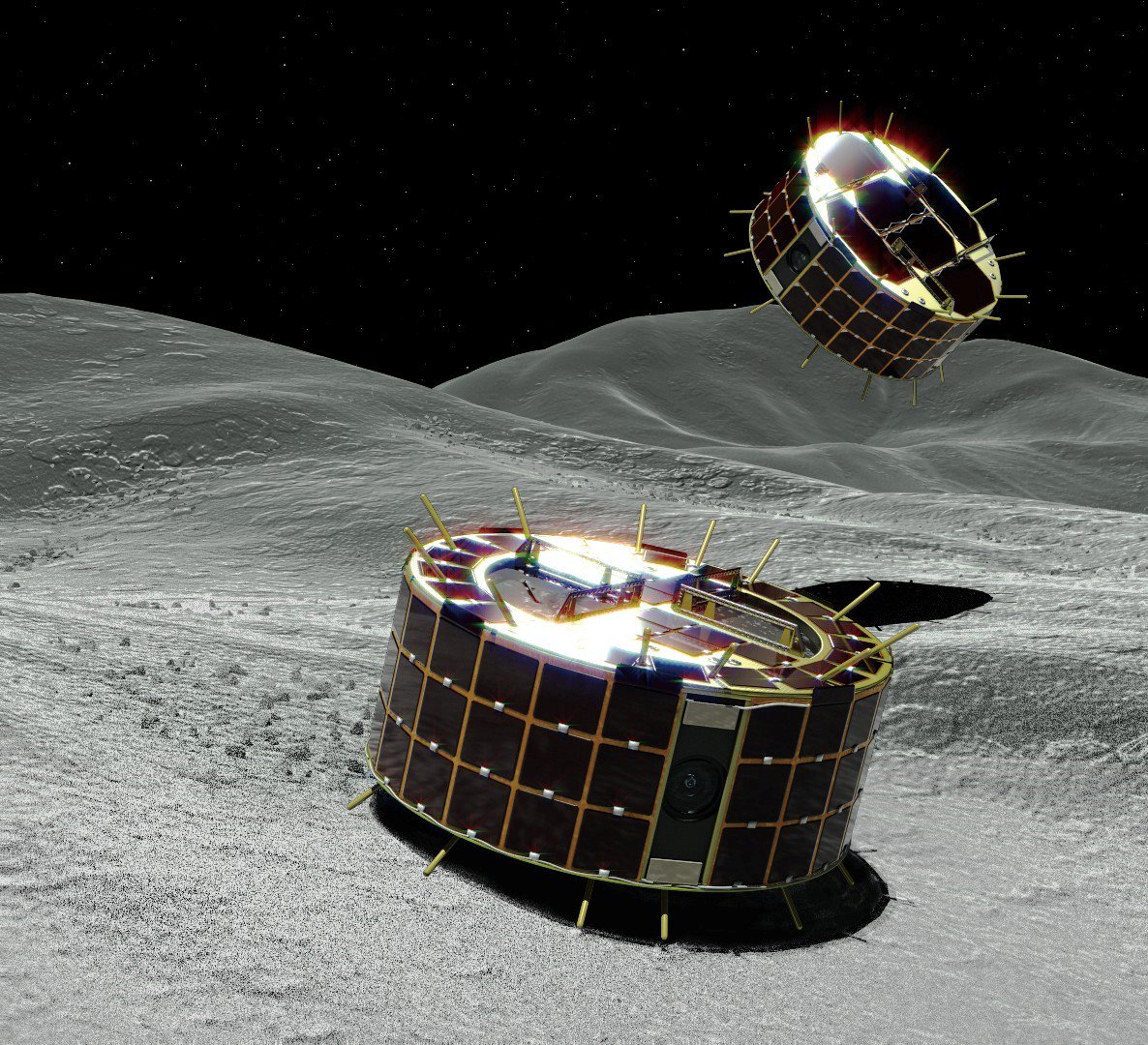
Stabilizacja trójosiowa. W skład sondy wchodzą cztery minipojazdy,
trzy japońskie (MINERVA-II-1 ROVER 1A,
MINERVA-II-1 ROVER 1B i MINERVA-II-2 ROVER 2) i
niemiecko-francuski MASCOT (Mobile
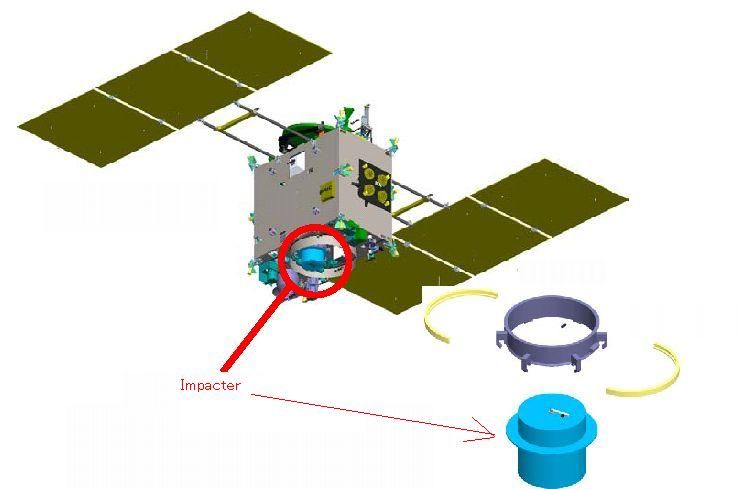
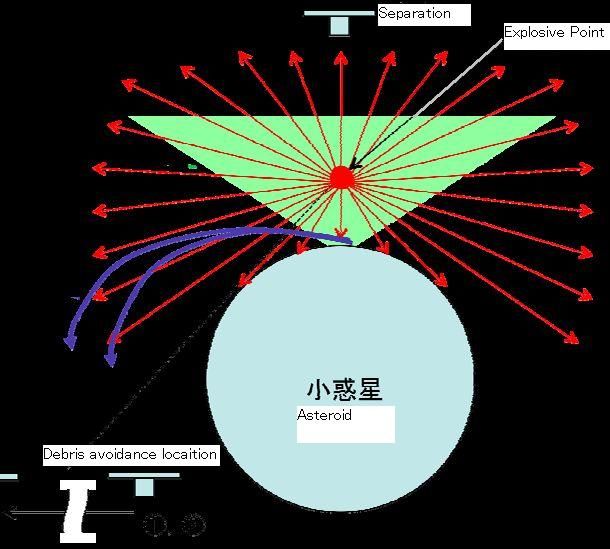
Asteroid Surface Scout) oraz impaktor. Sonda pobierze z planetki
trzy próbki - dwie z powierzchni, a trzecią
z wnętrza krateru (średnica 4-7 m, głębokość 0,8-1,0 m), który
powstanie w wyniku zdetonowania dwukilogramowego ładunku
wybuchowego tuż nad powierzchnią.
Przebieg lotu:
Zaplanowany na 30.11.2014 o 04:24:48 start został przełożony najpierw na 01.12.2014, a później na 03.12.2014 z powodu złych warunków atmosferycznych.
03.12.2014 o 04:22:04 nastąpił start.
01/02.09.2015 przy pomocy silnika jonowego wykonano manewr IES-TCM (dV=1,3 m/s, t=12 h).
03.11.2015 o 06:00 wykonano manewr TCM-1 (dV=23 cm/s, 4 impulsy, t=3,95").
26.11.2015 wykonano manewr TCM-2 (dV=4,6 cm/s, t=0,8").
03.12.2015 około 10:08 wykonała manewr grawitacyjny przy Ziemi (h=3090 km, dV=1,6 km/s).
W okresie od ??.04.2016 do ??.07.2016 aktywny był napęd jonowy.
W okresie od ??.01.2017 do ??.07.2017 aktywny był napęd jonowy.
10.01.2018 ponownie włączono napęd jonowy, był on aktywny do godziny 05:59 w dniu 03.06.2018, z przerwą od 11 do 14.05.2018 dla potrzeb nawigacji optycznej. W trzeciej sesji napędowej silnik funkcjonował przez 2426 godzin, zmiana prędkości wyniosła 393 m/s.
26.02.2018 kamera sondy po raz pierwszy zaobserwowała cel podróży.
17.05.2018 sonda znajdowała się w odległości poniżej 50 000 km od Ryugu, jej prędkość zbliżania wynosiła 0,05 km/s.
05.06.2018 sonda znajdowała się w odległości 2600 km od Ryugu.
08.06.2018 pomiędzy ~03:30 a ~04:40 wykonano manewr TCM01. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~24 cm/s (-X), 5 cm/s (-Y), 14 cm/s (Z). Odległość do celu spadła do ~1900 km, prędkość zbliżania do ~2,35 m/s.
11.06.2018 pomiędzy ~00:30 a ~01:40 wykonano manewr TCM02. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~13 cm/s (X), 1 cm/s (-Y), 26 cm/s (Z). Odległość do celu spadła do ~1320 km, prędkość zbliżania do ~2,1 m/s.
14.06.2018 pomiędzy ~03:40 a ~04:50 wykonano manewr TCM03. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~4 cm/s (-X), 40 cm/s (+Z). Odległość do celu spadła do ~750 km, prędkość zbliżania do ~1,7 m/s.
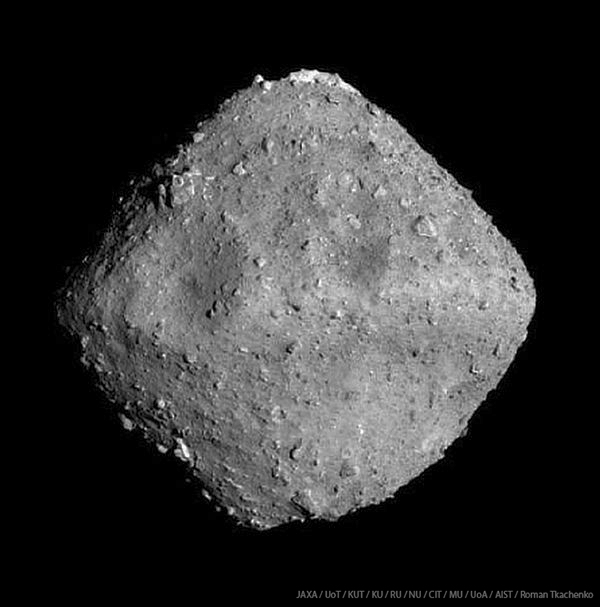
Animacja powstała ze złożenia 52 zdjęć z 14.06.2018 pokazała dość niezwykły kształt Ryugu. Zdjęcia wykonano z dystansu 700 do 650 km od celu.
16.06.2018 pomiędzy ~00:30 a ~01:40 wykonano manewr TCM04. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~10 cm/s (-X), 1 cm/s (+Y), 44 cm/s (+Z). Odległość do celu spadła do ~470 km, prędkość zbliżania do ~1,3 m/s.
18.06.2018 pomiędzy ~04:00 a ~05:10 wykonano manewr TCM05. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~8 cm/s (-X), 1 cm/s (+Y), 61 cm/s (+Z). Odległość do celu spadła do ~220 km, prędkość zbliżania do ~0,7 m/s.
20.06.2018 pomiędzy ~03:40 a ~04:50 wykonano manewr TCM06. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~3 cm/s (-X), 1 cm/s (+Y), 35 cm/s (+Z). Odległość do celu spadła do ~110 km, prędkość zbliżania do ~0,4 m/s.
22.06.2018 pomiędzy ~00:30 a ~01:40 wykonano manewr TCM07. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~2 cm/s (-X), 1 cm/s (+Y), 31 cm/s (+Z). Odległość do celu spadła do 45 km, prędkość zbliżania do ~9 cm/s.
24.06.2018 pomiędzy ~00:30 a ~01:40 wykonano manewr TCM08. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: 0,2 cm/s (+Y), 2 cm/s (+Z). Odległość do celu spadła do 38 km, prędkość zbliżania do ~8 cm/s.
26.06.2018 pomiędzy ~01:10 a ~01:20 wykonano manewr TCM09. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: ~0,8 cm/s (-X), 0,3 cm/s (+Y), 10 cm/s (+Z). Odległość do celu spadła do 23 km, prędkość zbliżania do ~2 cm/s.
27.06.2018 pomiędzy ~00:30 a ~00:35 wykonano manewr TCM10. Zmiana prędkości w poszczególnych osiach wyniosła odpowiednio: 0,7 cm/s (X), 2,8 cm/s (+Z). Odległość do celu spadła do 20,7 km, prędkość zbliżania do <1 cm/s. Formalnie nastąpił przylot do celu. Fotografia Ryugu z odległości 20 km.
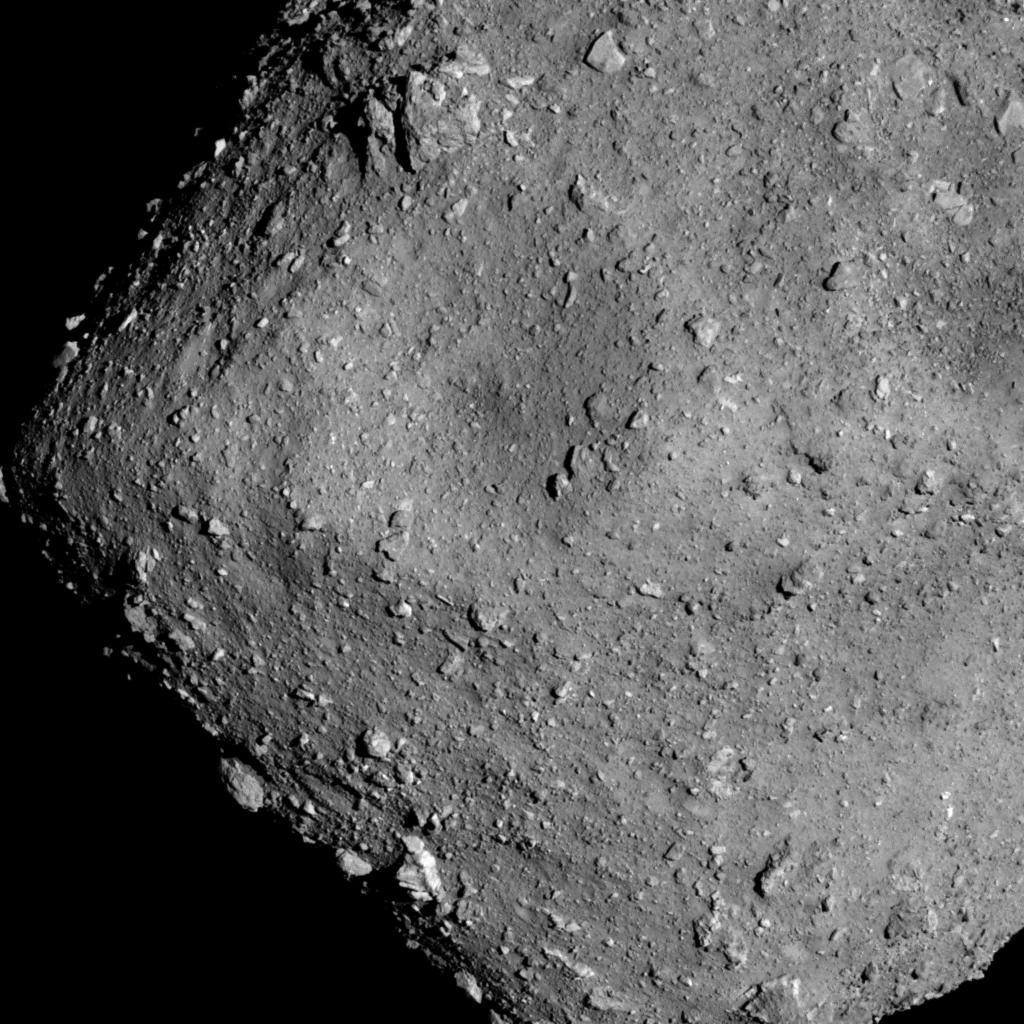
W dniach 17-25.07.2018 sonda zbliżyła się na odległość 6 km od planetki, po czym wróciła na pułap ~20 km, nazywany bazowym. Fotografia Ryugu z odległości 6 km.
01.08.2018 o 01:38 rozpoczęto zniżanie do pułapu 5 km z prędkością 40 cm/s. Zakończyło się ono o 11:32 na żądanym pułapie. Po zakończeniu badań, o 22:30 rozpoczęto powrót na pułap 20 km z prędkością ~20 cm/s.
03.08.2018 o 03:40 sonda powróciła na pułap 20 km.
06.08.2018 o 02:00 rozpoczęto opadanie z prędkością ~40 cm/s. O 11:30, na pułapie 6 km zwolniono opadanie do 8,5 cm/s. O 23:42 osiągnięto najniższy pułap 851 m. Rozpoczęto powrót z prędkością ~0,2 m/s.
07.08.2018 wznoszenie przerwano z powodu nadciągającego w pobliże centrum kontroli tajfunu.
10.08.2018 zakończono powrót na wysokość 20 km.
17.08.2018 sonda rozpoczęła manewr boczny o wartości 9 km, podczas którego pozostała w odległości 20 km względem powierzchni Ryugu.
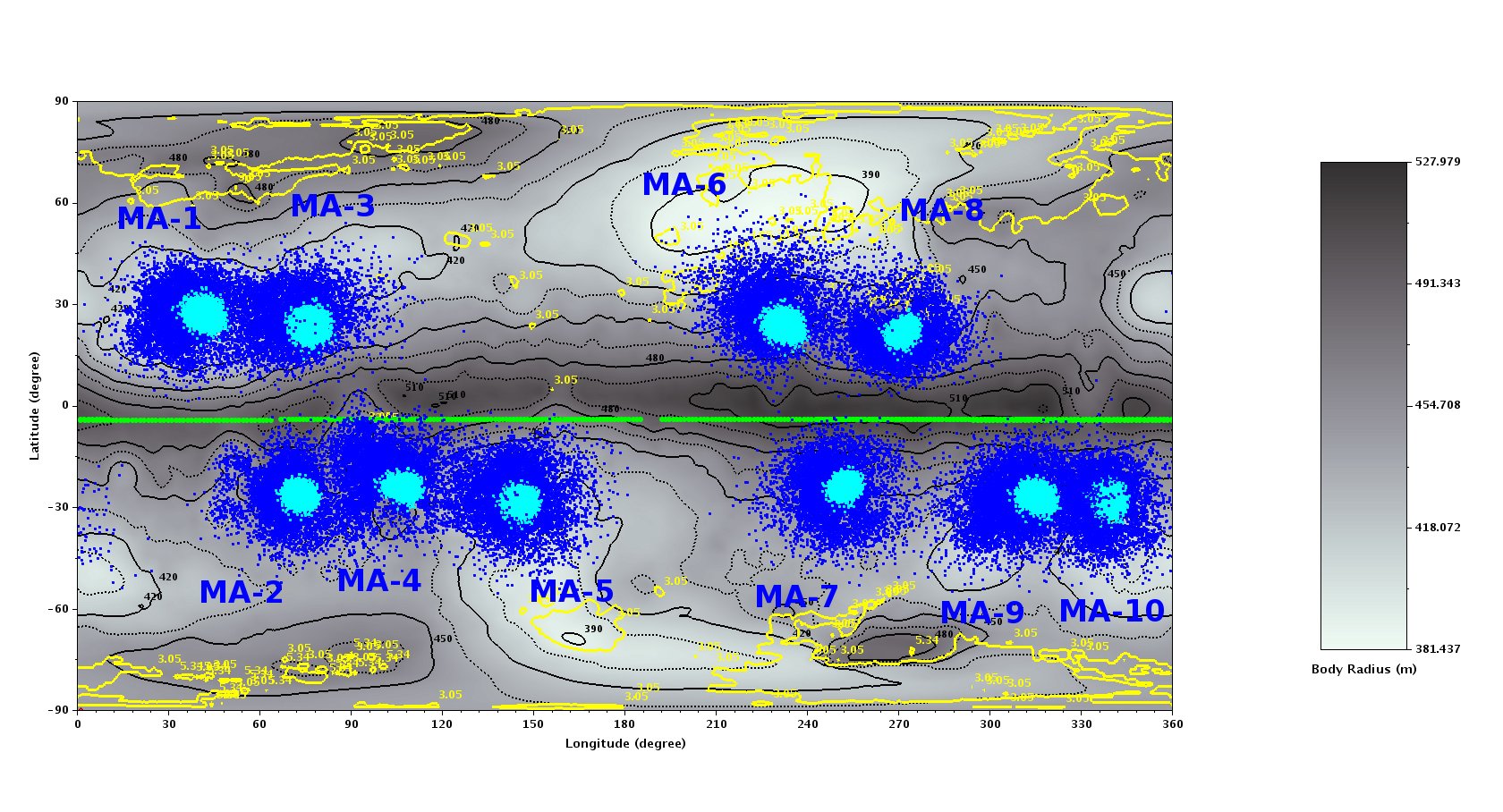
23.08.2018 ustalono, że miejscem lądowania pojazdu MASCOT będzie lokalizacja MA-9.
27.08.2018 sonda zakończyła badania podczas manewru bocznego.
11.09.2018 o 06:27 rozpoczęto operację Touchdown 1 Rehearsal 1 (TD1-R1). Jej celem było zejście do pułapu poniżej 40 metrów i symulacja lądowania. Operacja została przerwana na wysokości 600 m, gdyż LIDAR nie był w stanie zarejestrować odbicia sygnału od ciemniejszej, niż zakładano, powierzchni planetki.
20.09.2018 o 05:08 rozpoczęto operację umieszczenia na powierzchni pojazdów MINERVA-II-1 ROVER 1A i MINERVA-II-1 ROVER 1B. Sonda zaczęła zbliżać się do powierzchni z prędkością 20 cm/s.
21.09.2018 o 04:06 na wysokości ~55 m nad Ryugu, przy prędkości zniżania 10 cm/s oba pojazdy zostały wyrzucone w kierunku powierzchni, a sonda rozpoczęła wznoszenie do wysokości bazowej. Około 04:25 oba pojazdy opadły na powierzchnię, przekazując obrazy zarówno podczas opadania, jak i z powierzchni. Następnie rozpoczęły skoki, nadal przekazując obrazy i pomiary temperatury powierzchni.
22.09.2018 około 06:00 sonda osiągnęła wysokość bazową.
02.10.2018 o 03:14 sonda rozpoczęła zniżanie z pozycji bazowej w celu zrzucenia łazika MASCOT.
03.10.2018 o 01:57, 51 m nad Ryugu, przy prędkości zniżania ~10 cm/s pojazd został wyrzucony w kierunku powierzchni, a sonda rozpoczęła wznoszenie do wysokości 3 km. Około 02:17 MASCOT opadł na powierzchnię, gdzie działał przez 17 godzin i 7 minut.
08.10.2018 sonda osiągnęła wysokość bazową.
15.10.2018 wykonano operację TD1-R1-A, sonda zbliżyła się do powierzchni na 22 metry.
24.10.2018 o 04:00 rozpoczęto operację TS1-R3, zniżanie z prędkością początkową 40 cm/s z pułapu 20 km.
25.10.2018 o 02:37 z wysokości 13 metrów zrzucono na powierzchnię Target Marker B, o 02:38 osiągnęła minimalną wysokość 12 metrów, po czym, o 11:46, rozpoczęła wznoszenie.
27.10.2018, bezpośrednio po powrocie do wysokości bazowej, rozpoczęto operację BOX-C. W jej pierwszej części sonda zeszła 30.11.2018 na wysokość 5,1 km, a w drugiej, 01.11.2018, na 2,2 km. Następnie rozpoczęto powrót do wysokości bazowej, którą osiągnięto 05.11.2018.
W związku z koniunkcją Ryugu ze Słońcem, 23.11.2018 rozpoczęto wznoszenie sondy do pułapu 110 km.
30.11.2018 na wysokości 75 km wykonano korektę TCM01 (dV=3,77 mm/s).
11.12.2018 sonda osiągnęła wysokość 110 km.
13.12.2018 pojazdy MINERVA-II-1 ROVER 1A i MINERVA-II-1 ROVER 1B otrzymały nazwy własne - Mimizuku (jap. puchacz) i Fukuro (jap. sowa).
21.12.2018 o 01:00 sonda znajdowała się w odległości 82 km od Ryugu i opadała z prędkością 6 cm/s.
25.12.2018 o 01:00 na wysokości 56 km wykonano korektę TCM02.
25.12.2018 o 00:30 na wysokości 20 km wykonano korektę (dV=14 cm/s) i sonda powróciła na wysokość bazową. Zakończyła się koniunkcja ze Słońcem.
W końcu drugiej dekady stycznia 2019 sonda wykonała manewr przelotu do pozycji BOX-B (2 km w dół i 9 km w bok w kierunku bieguna północnego), który osiągnęła 24.01.2019, spędziła tam około doby, po czym powróciła 31.01.2010 do nominalnej BOX-A.
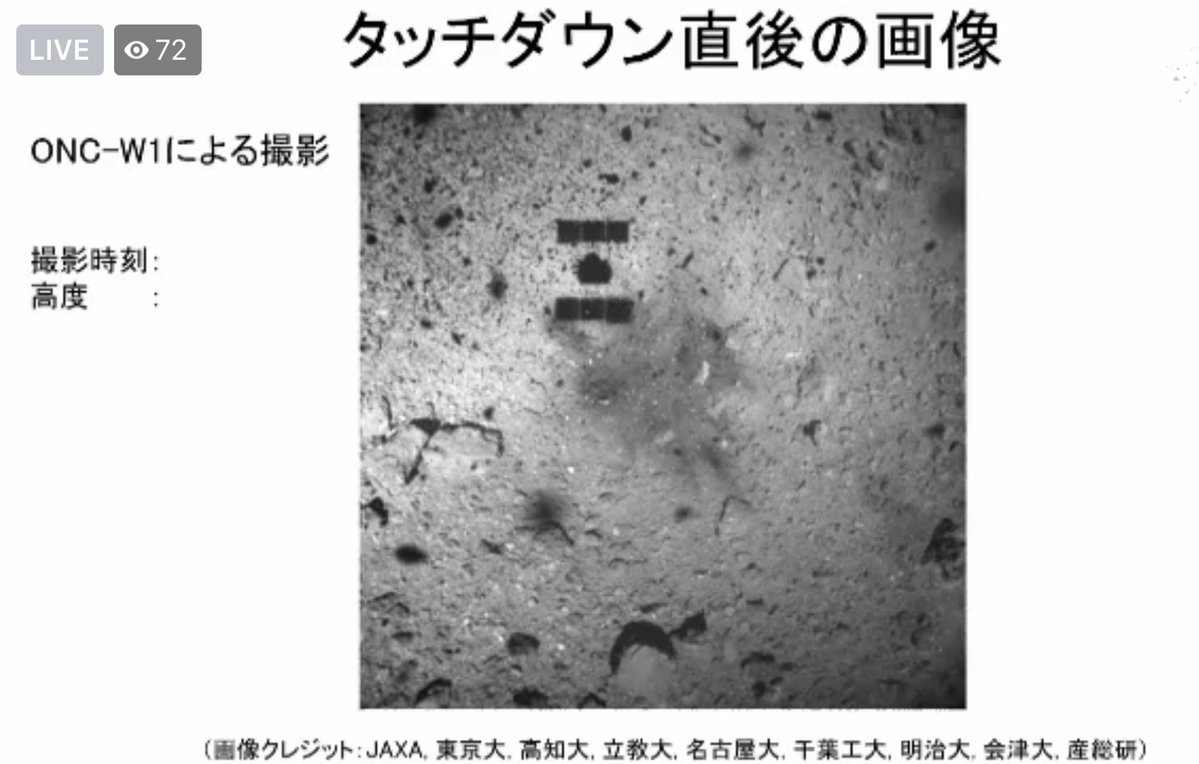
21.02.2019 o 22:29 sonda pobrała z rejonu L08-E1 pierwszą próbkę gruntu (operacja TD1). Fotografia wykonana podczas odlotu po pobraniu próbki.
23.02.2019 o 03:00 sonda powróciła na wysokość bazową.
Bezpośrednio potem wykonano operację przelotu BOX-C, podczas
której sonda zeszłą na pułap 5 km, wykonując m. in. obserwacje
głazu Otohime.
06.03.2019 rozpoczęto operację DO1-S01 (Descent Observation).
08.03.2019 o 03:24 (03:42 ERT) osiągnięto wysokość 21 m, po czym rozpoczęto wznoszenie.
09.03.2019 o 04:00 osiągnięto wysokość bazową.
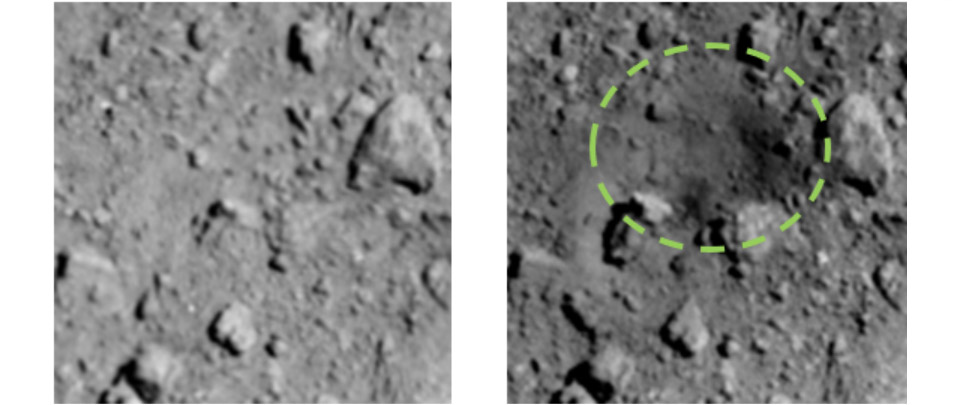
04.04.2019 o 04:17 rozpoczęto zniżanie w celu wykonania operacji SCI (Small Carry-on Impactor) - generacji krateru.
05.04.2019 o 01:56 zrzucono SCI, a sonda zaczęła wykonywać manewr ukrycia się za krzywizną planetki. O 02:14 odłączono kamerę DCAM3, która zarejestrowała przebieg operacji. O 02:36 nastąpiła eksplozja.
25.04.2019 opublikowano dwa zdjęcia (drugie wykonano z wysokości 1,7 km) - obszar przed eksplozją i po niej.
16.05.2019 na wysokości 50 metrów przerwano operację zrzucenia markera TM-A (operacja PPTD-TM1).
30.05.2019 z wysokości 9 m zrzucono marker TM-A (operacja PPTD-TM1A)
13.06.2019 wykonano obserwacje z niskiego pułapu (PPTD-TM1B).
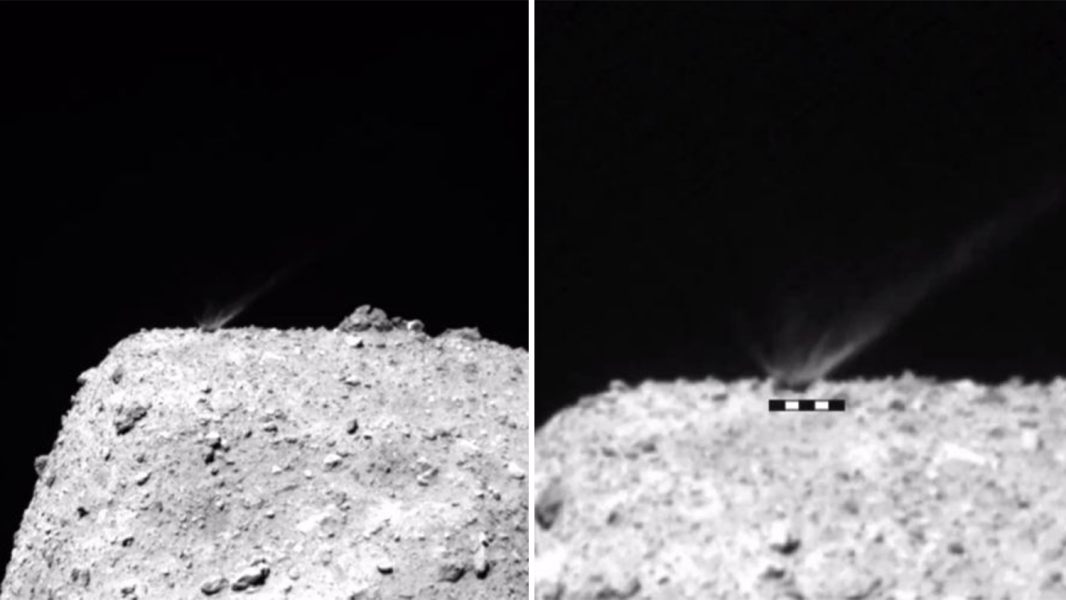
11.07.2019 sonda pobrała drugą próbkę gruntu (operacja PPTD).
29.08.2019 sonda weszła w stan safe mode z powodu awarii koła zamachowego nr 4. W dniu następnym przywrócono normalny status sondy, jednak wyznaczona na 05.09.2019 operacja zrzucenia markera została wstrzymana.
12.09.2019 rozpoczęto operacje zniżania sondy w celu zrzucenia dwóch markerów.
16.09.2019 o 16:17 zrzucono z wysokości 1 km Target Marker-E, a o 16:24 TM-C. Pierwszy został skierowany ku równikowi, drugi ku biegunowi. Obiekty otrzymały nazwy Sputnik i Explorer. Sonda została skierowana na wysokość bazową.
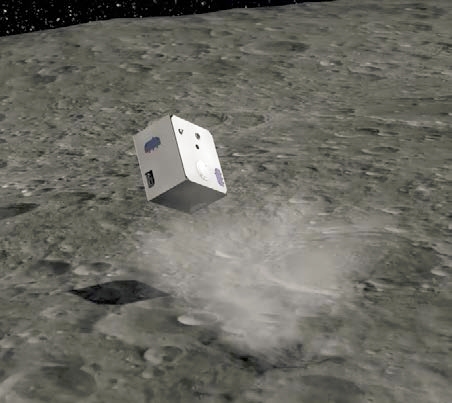
28.09.2019 o 01:30 rozpoczęto zniżanie sondy w celu zrzucenia łazika MINERVA-II-2 Rover 2.
02.10.2019 o 15:57 został zrzucony z wysokości łazik MINERVA-II-2 Rover 2. Sonda rozpoczęła wzlot do pozycji BOX-C (pułap 8 km).
03.10.2019 około 14:00 MINERVA-II-2 Rover 2 opadł na powierzchnię planetki, po czym otrzymał nazwę ULULA (University-made Landing Unit for Locomotion on Asteroid). Awaria komputera spowodowała, że nie przekazuje on żadnych danych.
08.10.2019 sonda osiągnęła pozycję BOX-C.
10.10.2019 sonda rozpoczęła wzlot do pozycji bazowej.
14.10.2019 sonda osiągnęła pułap bazowy.
13.11.2019 o 00:05:00 wykonano z pomocą silników manewrowych manewr wejścia na orbitę heliocentryczną (dV=9,2 cm/s),
Od 20.11.2019 do 02.12.2019 testowano silniki jonowe.
03.12.2019 rozpoczęto pierwszą fazę powrotu na Ziemię z użyciem silników jonowych.
05.02.2020 zakończono pierwszą fazę lotu z użyciem silników jonowych. Podczas niej zmiana prędkości wyniosła ok. 100 m/s. Zużyto 27 kg ksenonu, pozostało 39 kg.
18.02.2020 rozpoczęto korektę trajektorii, zakończono ją 19.02.2020 o 22:01.
11.05.2020 o 22:00 rozpoczęto drugą fazę powrotu na Ziemię z użyciem silników jonowych.
16.09.2020 o 18:15:45 przeprowadzono korektę TCM-0, co zakończyło drugą fazę powrotu na Ziemię z użyciem silników jonowych. Dokonano też wyboru kolejnego celu, planetki 1998 KY26 z grupy Apollo o średnicy około 30 m i czasie obrotu 10,7 minuty. Należy ona do klasy X i jest prawdopodobnie metaliczna. Podczas lotu nastąpi też przelot koło planetki (98943) 2001 CC21 o średnicy 710 metrów (formalnie pomiędzy 347 a 1552 m).
22.10.2020 o 09:00 wykonano manewr TCM-1.
12.11.2020 o 06:45 wykonano manewr TCM-2 (dV=1 cm/s).
25.11.2020 o 07:00 wykonano manewr TCM-3 (dV=1,2 m/s).
01.12.2020 o 07:00 wykonano manewr TCM-4 (dV=4,5 cm/s).
05.12.2020 o 05:30 kapsuła została oddzielona od sondy. Pomiędzy
06:30 a ~07:30 wykonano trzyimpulsową korektę TCM-5, która
odchyliła trajektorię sondy od wtargnięcia w atmosferę Ziemi i
skierowała ją na orbitę, mającą doprowadzić do odwiedzenia
kolejnych celów. O 17:54 kapsuła wylądowała na terenie Woomera Range Complex w
Australii. W jej wnętrzu znajdowało się 5,4 g
regolitu.
05.01.2021 około 03:00 uruchomiono silniki jonowe.
Plan misji:
| data | zdarzenie |
| ??.07.2026 | przelot koło planetki 2001 CC21 |
| ??.12.2027 | przelot koło Ziemi |
| ??.06.2028 | przelot koło Ziemi |
| ??.07.2031 | spotkanie z planetką 1998 KY26 |
Strona główna | Witryna projektu Hayabusa-2 | Sondy kosmiczne | NEO
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}