 |
 |
|
|
|
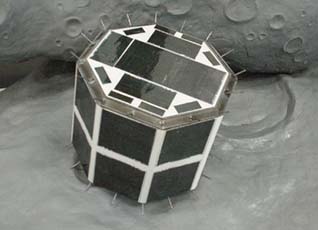
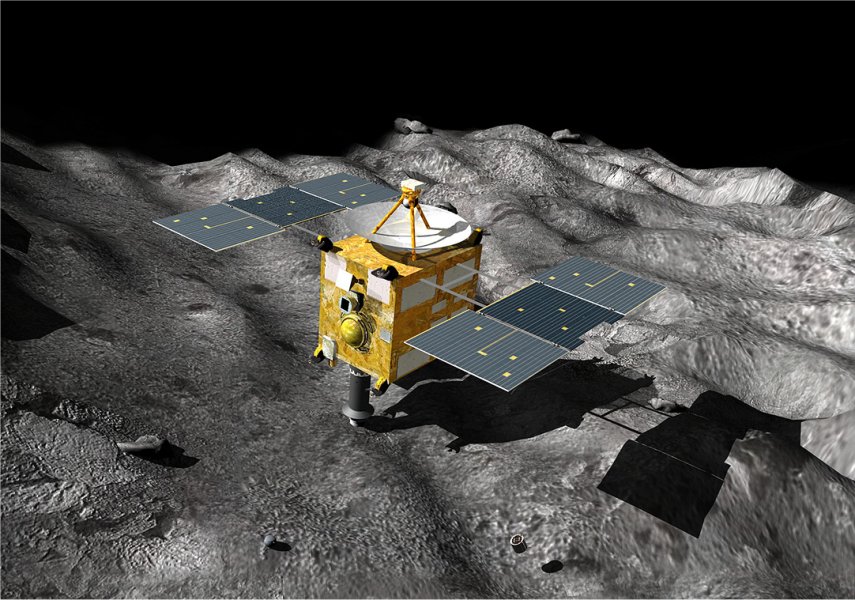
Japońska sonda kosmiczna, której celem jest weryfikacja czterech technologii: silnika jonowego, systemu nawigacji autonomicznej, metody uzyskiwania próbek z małych ciał Układu Słonecznego i dostarczania ich na Ziemię. Po udanym starcie otrzymała nazwę Hayabusa (Sokół wędrowny), dotychczasowa oznaczała trzeci (c) obiekt technologiczny wysłany przy pomocy RN serii M (Mu).
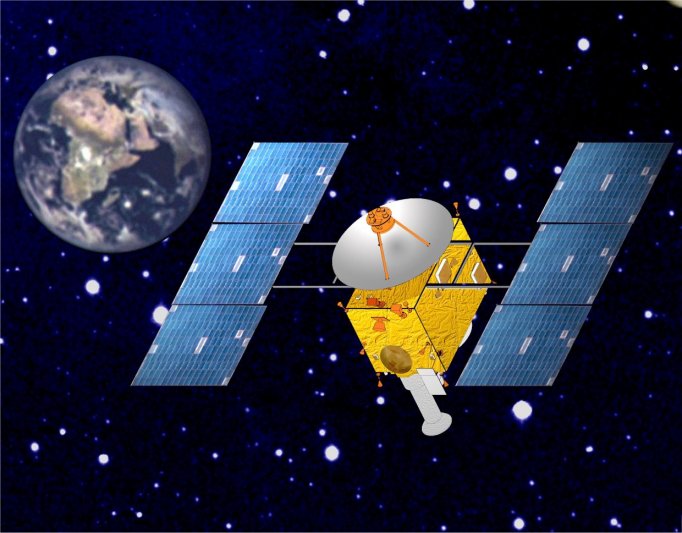
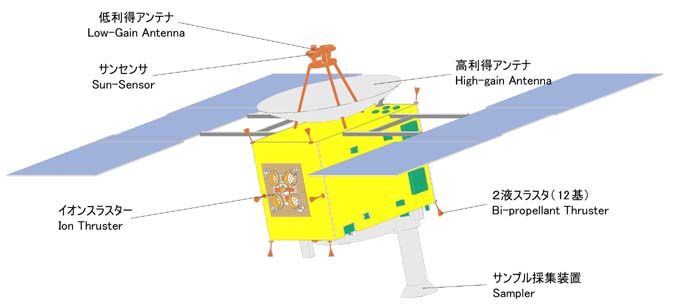
Rakieta nośna M-5. Start z kosmodromu Kagoshima. Masa całkowita sondy 500 kg (w tym czterotlenek azotu i hydrazyna 50 kg, ksenon 65 kg, kapsuła powrotna 20 kg). Wymiary: 1,5 x 1,5 x 1,2 m. Sonda jest stabilizowana trójosiowo, kapsuła podczas powrotu na Ziemię rotacyjnie. Zasilanie z baterii słonecznych (dwa panele o łącznej powierzchni 12 metrów kwadratowych) o mocy 700 W w odległości 1 AU od Słońca. Ciąg silniczków napędu chemicznego wynosi 22 N, napędu jonowego 15-20 mN, impulsy całkowite wynoszą odpowiednio 290 i 2980 kNs (dane szacunkowe). Całkowita zmiana prędkości wynosi 4000 m/s. Komunikacja z Ziemią odbywa się poprzez antenę paraboliczną o dużym zysku (średnica 1,5 m, moc 20 W).
W skład aparatury naukowej wchodzą 3 instrumenty: spektrometry promieni X i bliskiej podczerwieni i służący do pobrania próbek Sampler. Prócz tego do celów ustalenia kształtu i topografii planetki służą przyrządy systemu nawigacji: dwie kamery - wąskokątna ONC-T Optical Navigation Camera-Telescope) i szerokokątna ONC-W (Optical Navigation Camera-Wide-View), LIDAR (Light Detection And Ranging), LRF (Laser Range Finder) oraz FBS (Fan Beam Sensors).
Dodatkowo na pokładzie sondy znajdują się inne obiekty: TM (3 znaczniki celu Target Marker) i MINERVA (MIcro/Nano Experimental Robot Vehicle for Asteroid) - robot skaczący o masie 591 gramów wyposażony w 3 kolorowe kamery CCD - w tym parę stereoskopową o rozdzielczości poniżej milimetra z odległości 10 cm - oraz 6 czujników do pomiaru temperatury).
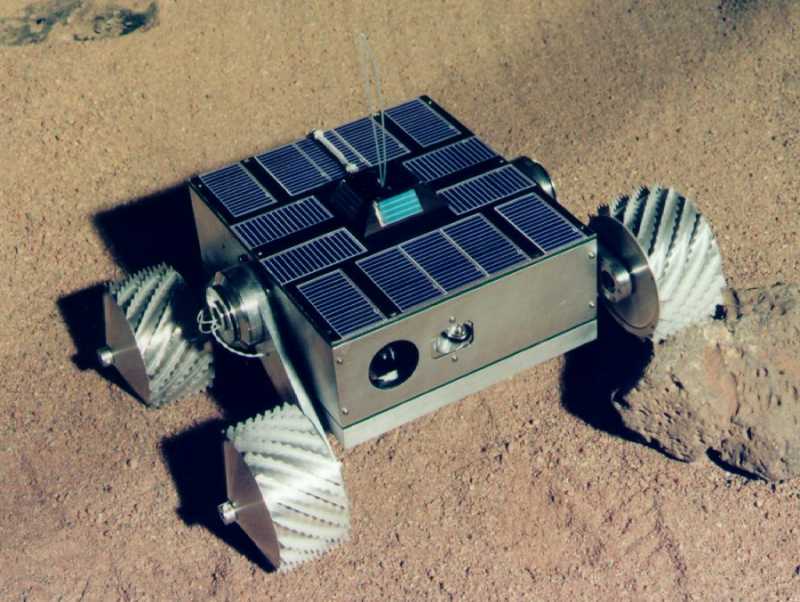
03.11.2001 NASA skasowała swój udział w projekcie - kołowy minipojazd MUSES-CN.
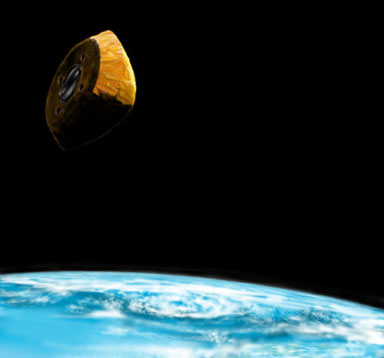
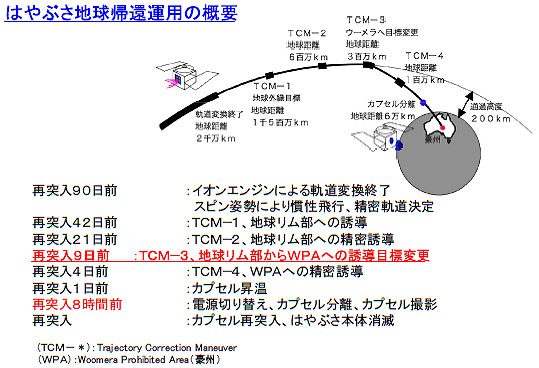
Po zakończeniu badań sonda odleci w grudniu 2005 roku w kierunku Ziemi, ponownie korzystając z silnika jonowego. Podczas zbliżenia, w odległości około 400 000 km od naszej planety od sondy oddzieli się kapsuła lądująca z próbkami gruntu. Po wejściu w atmosferę (prędkość wejścia 12,2 km/s, maksymalne przeciążenie 25G) i hamowaniu aerodynamicznym sonda opadnie na spadochronie i miękko wyląduje na powierzchni Ziemi. Schemat podejścia do Ziemi i możliwe manewry korekcyjne.
Wyznaczony początkowo na 24.11.2002 start został przełożony z powodów technicznych - źle działał zawór regulacji ciśnienia silnika.
Start nastąpił 09.05.2003 o 04:29:25 z Kagoshima US.
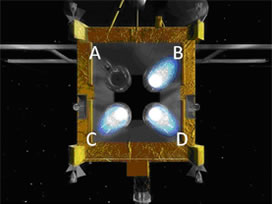
27.05.2003 aktywowano pierwszy silnik jonowy sondy, a począwszy od 25.06.2003 jednocześnie działają trzy (z czterech) takie silniki.
Po oddzieleniu od RN sonda rozpoczęła lot ku planetoidzie (25413) 1998SF36 (Itokawa) z wykorzystaniem silnika jonowego.
12.05.2004 o 02:00 wykonano drobną korektę (13,2 cm/s) orbity przed zbliżającym się manewrem asysty grawitacyjnej.
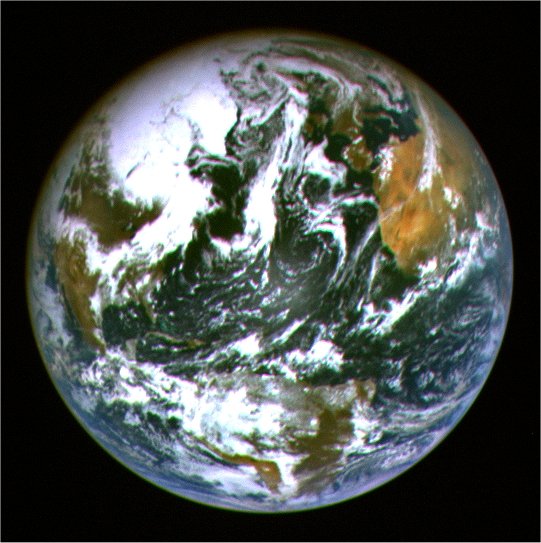
18.05.2004 sonda przekazała serię zdjęć Ziemi i Księżyca, m. in. to, wykonane z odległości 295 000 km nad Atlantykiem.
19.05.2004 o 06:23 sonda przeleciała w pobliżu Ziemi (3725 km nad południowym Pacyfikiem), pomyślnie wykonując manewr asysty grawitacyjnej.
Krótko po aktywacji z powodu niestabilności silnik jonowy A został wyłączony.
09.12.2004 sumaryczny czas pracy silników jonowych osiągnął 20 000 godzin. Zużyto przy tym 20 kg substancji roboczej, zmiana prędkości wyniosła 1 300 m/s.
W czerwcu 2005 JAXA ujawniła, że w wyniku rekordowej erupcji słonecznej jesienią 2003 roku baterie słoneczne próbnika zostały znacząco zdegradowane, co spowodowało lekki niedobór energii elektrycznej. W związku z tym planowany na czerwiec 2005 roku przylot sondy do planetoidy został przesunięty na początek września, a czas przeznaczony na wykonanie wszystkich operacji w jej pobliżu skrócony z czterech do dwóch miesięcy.
07.07.2005 odległość sondy od planetoidy wynosiła 143 100 km.
31.07.2005 awarii uległo jedno z trzech kół zamachowych sondy (oś X).
28.08.2005 sonda przeszła z napędu jonowego na chemiczny. Znajdowała się wówczas w odległości 4800 km od celu i zbliżała się do niego z prędkością 32 km/h. Łącznie silniki jonowe były w użyciu przez 25800 godzin i zmieniły prędkość sondy o 1,4 km/s, zużywając przy tym 22 kg ksenonu.
02.09.2005 odległość od celu wynosiła 1550 km.
06.09.2005 o 00:00 sonda znajdowała się w odległości 500 km od celu.
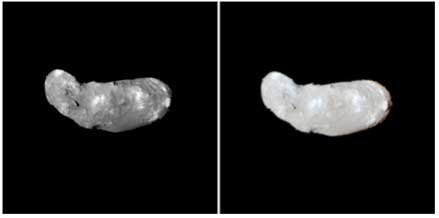
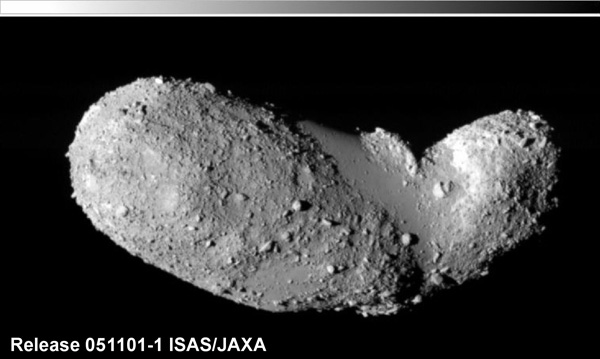
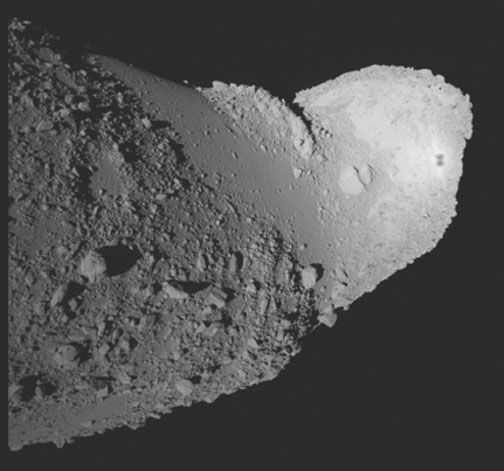
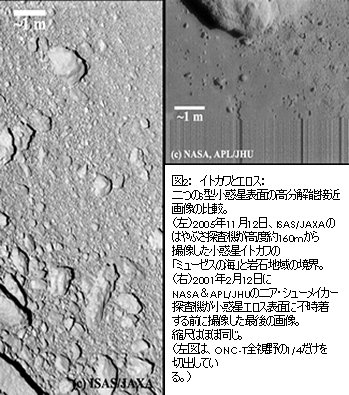
07.09.2005 o 16:00 sonda znajdowała się w odległości 220 km od celu (prędkość zbliżania wynosiła 7 km/h). Przekazała wówczas zdjęcie, które po obróbce komputerowej ukazało pierwsze szczegóły powierzchni. Ustalono również dokładne rozmiary planetki - 540 x 310 x 250 metrów.
12.09.2005 o 01:00 Hayabusa wykonała manewr hamowania (dV=0,14 m/s, JAXA podaje 0,07 m/s), po którym "zaparkowała" w odległości 20,25 km od Itokawy. Różnica prędkości wynosi zaledwie 0,25 mm/s. Seria zdjęć pokazujących planetkę Itokawa: 1 | 2 | 3 | 4 | 5 | 6 .
15.09.2005 dystans do planetki został zmniejszony do 17 km.
19.09.2005 dystans do planetki został zmniejszony do 15 km.
21.09.2005 dystans do planetki został zwiększony do 19,5 km.
22.09.2005 kontrolerzy lotu sondy zaproponowali trzy nazwy utworów na powierzchni planetki.
26.09.2005 dystans do planetki został zmniejszony do 16 km (w najbliższym czasie zostanie zmniejszony do 7 km).
30.09.2005 dystans do planetki został zmniejszony do 6,8 km - jednocześnie wydano impuls (dV=5 cm/s), który ponownie zaczął odsuwać sondę od powierzchni planetki.
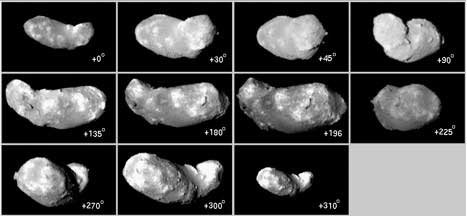
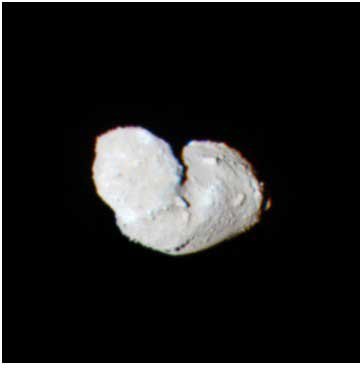
03.10.2005 o 08:08 awarii uległo drugie koło zamachowe (oś Y). Do tego czasu sonda zdołała wykonać dokładną mapę prawie całej powierzchni planetki. Obecnie trwa opracowywanie metod dalszej pracy przy pomocy jednego koła zamachowego (oś Z) i pary silniczków sterujących RCS. Fotografia planetki wykonana 04.10.2005.
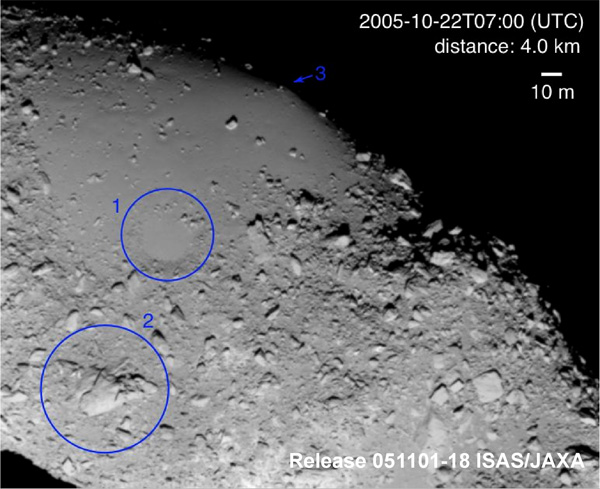
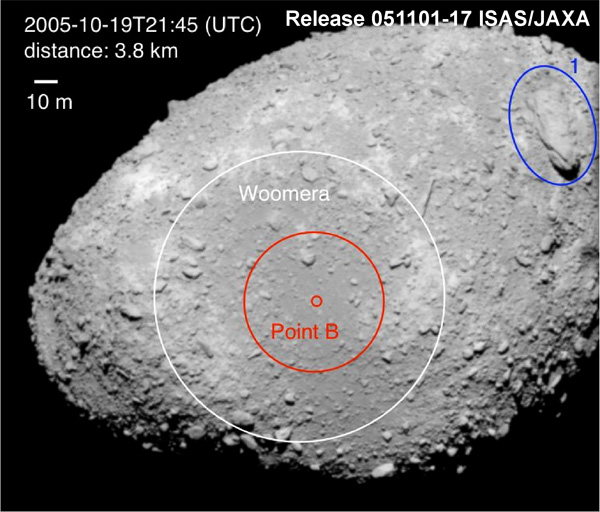
01.11.2005 sonda znajdowała się w odległości 4,4 km od planetki. Kolejna seria zdjęć pokazujących planetkę Itokawa: 1 | 2 | 3 | 4 | 5 oraz planowane miejsca pobrania próbek - A i B.
03.11.2005 o 19:17 z wysokości 3,5 km sonda rozpoczęła zbliżanie do powierzchni planetki. O 23:15 znajdowała się w odległości 1700 metrów od niej.
04.11.2005 o 01:50 odległość wynosiła 1 km, dalsze zbliżanie trwało do około 02:40, kiedy to w odległości około 700 metrów pojawił się "błędny sygnał" (nieoficjalnie wiadomo, że próbnik utracił zdolność rozpoznawania celu) i próba generalna została przerwana o 03:30, a sonda powróciła na wysokość 3 km. Tym samym osadzenie na powierzchni robota MINERVA nie zostało dokonane (jest ono konieczne przed pobraniem próbek). MINERVA powinna zostać zrzucona z wysokości 15 metrów.
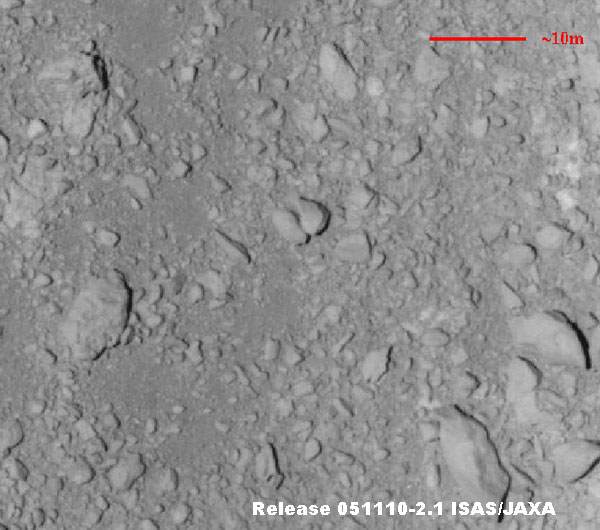
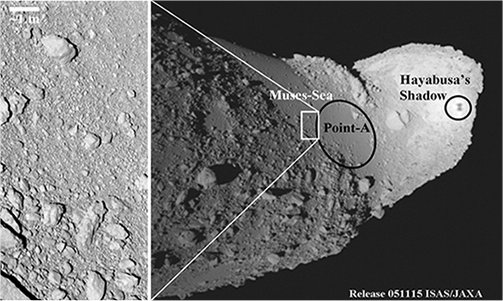
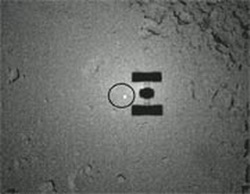
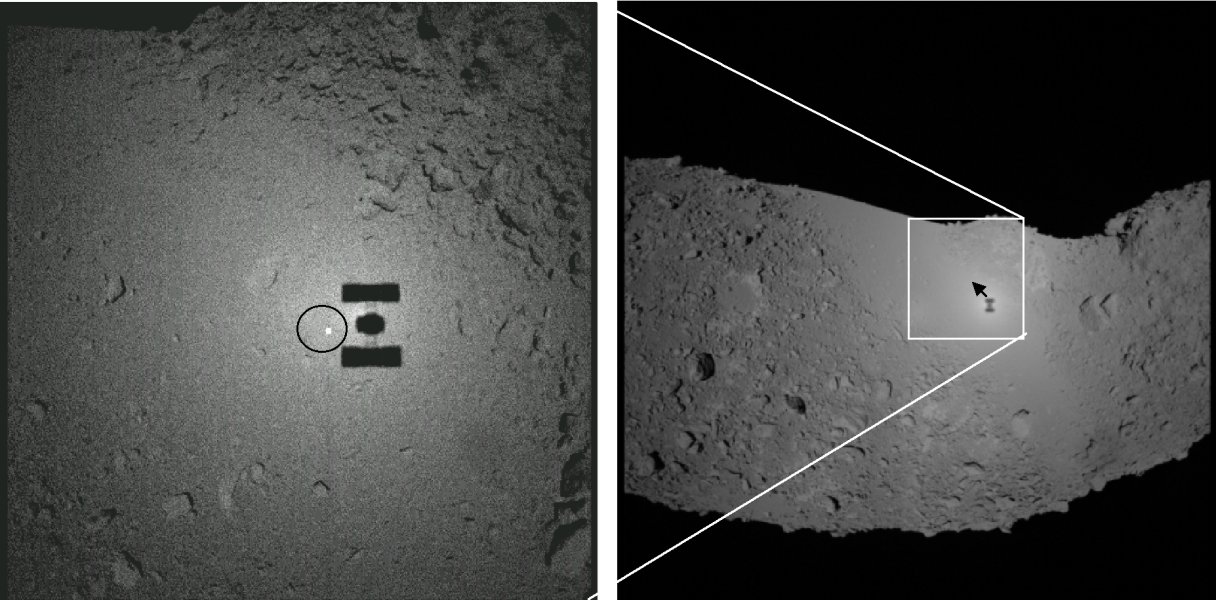
09.11.2005 sonda zbliżyła się na odległość 70 metrów od Itokawy - tym razem nie wystąpiły żadne kłopoty. Sonda przekazała m. in. fotografię własnego cienia na powierzchni planetki. Zrzucono również znacznik celu TM-1. Zdjęcie wykonane z minimalnej wysokości, pokazujące głazy o rozmiarach rzędu 20 metrów.
11.11.2005 rozpoczęto drugą generalną próbę lądowania, połączoną z osadzeniem robota MINERVA na powierzchni. O 18:00 sonda znajdowała się 1,4 km od środka planetki, a o 22:59 około 900 metrów od jej powierzchni. Kolejne dwa ujęcia powierzchni Itokawy: 1 | 2 .
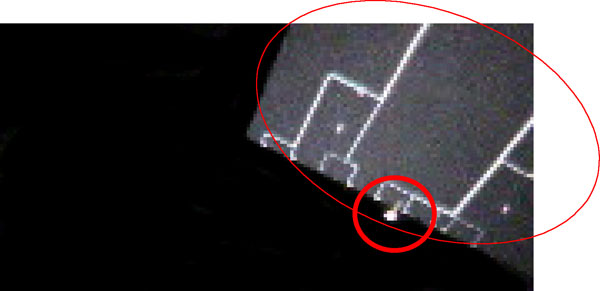
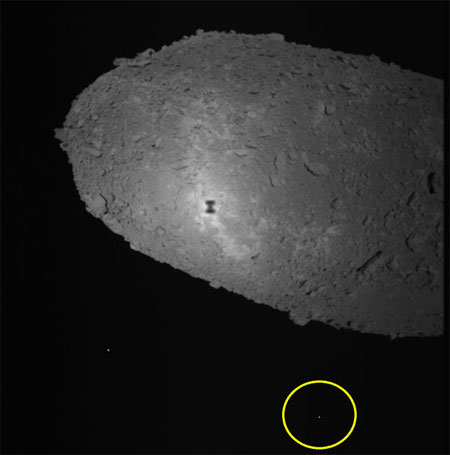
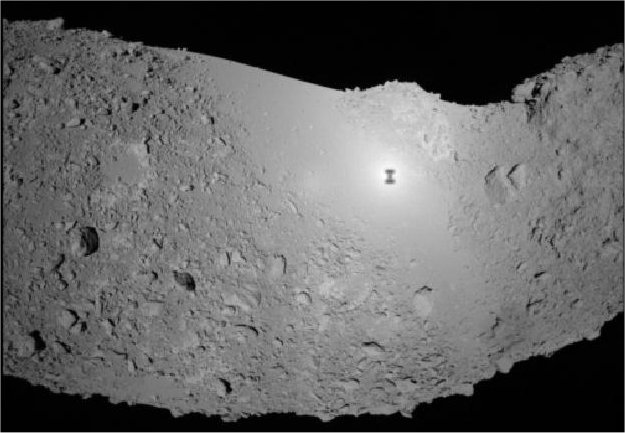
12.11.2005 o 04:00 sonda znajdowała się 430 metrów od środka planetki, o 05:20 200 metrów od powierzchni, o 05:45 - 120 metrów, a o 05:55 zawisła na 100 metrach. O 06:24 (sonda była wówczas na wysokości 55 metrów) komendą z Ziemi zwolniono robota MINERVA. Tymczasem Hayabusa ponownie rozpoczął wznoszenie, o 07:10 był już na pułapie 1 km. MINERVA powinna opaść na powierzchnię około 07:30 z prędkością 5 cm/s, jednak mikrorobot ominął cel z prędkością większą od prędkości ucieczki (dla planetki wynosi ona zaledwie około 20 cm/s), gdyż do odłączenia doszło już podczas manewru wznoszenia, na pułapie 200 metrów. Wznoszenie zostało wykonane w trybie automatycznym po uzyskaniu informacji z dalmierza o bliskości powierzchni, a sygnał wysłano z Ziemi mniej więcej w tym samym czasie (czas lotu sygnału wynosi 16 minut). MINERVA przez krótki czas nadawała sygnały, jej żywotność była obliczona na 2-3 doby, jednak praktycznie nie było możliwości umieszczenia jej na powierzchni planetki (choć ciśnienie wiatru słonecznego wyhamowało ją po kilku dniach i spowodowało powrót w okolice planetki w dniu 25.11.2005, jednak szansa trafienia w nią była nikła). Dwie fotografie potwierdzające oddzielenie mikrorobota od sondy: na tle panelu baterii słonecznych i w szerszym planie. Kolejne dwa ujęcia powierzchni Itokawy: 1 | 2 .
19.11.2005 o 19:30 rozpoczęto pierwszą próbę pobrania gruntu z punktu A- zniżanie z pułapu 450 metrów. O 19:40 odległość wynosiła 420 m. O 20:00 dystans zmniejszył się do 370 metrów, o 20:10 do 290 metrów, a o 20:20 do 230 m. O 20:30 dystans zmniejszył się do 160 metrów. O 20:40 dystans wynosił 90 metrów. O 20:50 z wysokości 40 metrów na powierzchnię planetki zrzucono znacznik TM-2, który opadł na nią w niespełna 400 sekund i odbijał błyski wysyłane przez LRF.
Następnie sonda opadła do pułapu 17 metrów na którym znacznie zwolniła (zniżała się z prędkością 2 cm/s) i utraciła kontakt z Ziemią (z powodu utraty stabilizacji), a o 21:10 opadła na powierzchnię planetki, odbijając się kilkakrotnie od niej i osiadła o 21:30 - jednak pocisk mający wyrzucić fragmenty gleby nie został odpalony. O 21:58 sonda wystartowała, prawdopodobnie bez żadnych istotnych uszkodzeń.
O 22:00 wysłano sygnał zaniechania procedury pobrania próbki gruntu, wzniesienia się na wyższy pułap i wejścia w stan "safe mode", jednak komendy te nie zostały przyjęte przez sondę. Mniej więcej w tym czasie w komputerze wystąpił błąd oprogramowania nawigacyjnego, który spowodował m. in. reset komputera oraz opóźnił automatyczne wejście w stan "safe mode". Niewykluczone, że jednym z powodów awarii oprogramowania był nieprzewidzianie mały kąt oświetlenia paneli baterii słonecznych.
20.11.2005 o 00:32 odzyskano kontakt z sondą - okazało się, że wzniosła się z nieoczekiwanie dużą prędkością na wysokość ~100 km od planetki (planowano 3 km) w stanie "safe mode" i obrotowym reżimie stabilizacji.
21.11.2005 została przywrócona stabilizacja trójosiowa i rozpoczęto powrót w pobliże planetki oraz pełen zrzut danych telemetrycznych z nieudanego lądowania.
Zakładano bezpośrednio po stwierdzeniu kontaktu z gruntem wykonanie procedury pobrania próbki gruntu. Z Samplera zostaje wystrzelony z prędkością 300 m/s kilkugramowy nabój wykonany z tantalu, który wbijając się w grunt, wyrzuca próbkę gleby, która samoistnie zostaje umieszczona w pojemniku odbiorczym. Bezpośrednio po pobraniu próbki następuje start sondy. Cała procedura od momentu kontaktu z gruntem do startu trwa zaledwie około jednej sekundy. Następnie sonda wznosi się na pułap 100 metrów i oczekuje na komendy z Ziemi. Planuje się zebrać próbkę o masie około 1 grama.
22.11.2005 sonda była w odległości 77 km od planetki.
23.11.2005 sonda była w odległości 30-40 km od planetki.
24.11.2005 sonda była w odległości 20 km od planetki.
25.11.2005 o 22:07 sonda wylądowała z prędkością 10 cm/s w rejonie A na powierzchni Itokawy (wykorzystując zrzucony uprzednio marker TM-2), gdzie miała pobrać próbkę gleby, odpalając dwa pociski w odstępie 0,2 sekundy, a następnie rozpoczęła wznoszenie do pułapu 6,5 km, na którym się zatrzymała i weszła w "safe-mode". Wystąpiły problemy z silniczkami sterującymi - nastąpiła niekontrolowana ucieczka gazu z systemu stabilizacji w obwodzie A, natomiast zawór lub przewód paliwa w obwodzie B prawdopodobnie zamarzł, co spowodowało kłopoty z orientacją. Nastąpił reset większości systemów sondy, spowodowany najprawdopodobniej znacznym niedostatkiem energii elektrycznej i ich wyziębieniem.
W dniach 27 i 28.11.2005 wystąpił brak łączności.
29.11.2005 około 01:00 łączność została częściowo przywrócona (tylko przez antenę dookólną o małym zysku z prędkością 8 bps i to jedynie przez mniej więcej 1 sekundę podczas 6-sekundowego obrotu sondy). Część danych z pamięci DRAM, zawierająca m. in. dane na temat ostatniej próby pobrania próbki została bezpowrotnie utracona.
02.12.2005 próba ożywienia silników chemicznych zakończyła się fiaskiem.
03.12.2005 stwierdzono odchylenie anteny HGA w osi +Z (w kierunku Słońca i Ziemi) o około 20-30°.
04-05.12.2005 rozpoczęto utrzymywanie stabilizacji przy pomocy wyrzutu atomowego ksenonu z silników jonowych - udało się zmniejszyć kąt osi +Z do 10-20°, co spowodowało możliwość odbioru danych poprzez antenę o średnim zysku z prędkością do 256 bps. Okazało się wówczas, że z dużą dozą prawdopodobieństwa (80%) żaden pocisk nie został odpalony, a co za tym idzie, próbka nie została pobrana.
06.12.2005 sonda była w odległości 550 km od planetki i oddalała się od niej z prędkością 5 km/h. Trwało testowanie jej systemów i próba przywrócenia sprawności silnika chemicznego oraz przygotowania do uruchomienia silnika jonowego. Sonda znajduje się wg JAXA w stanie "krytycznym".
08.12.2005 obrót statku udało się zmniejszyć do jednego na 6 minut.
09.12.2005 nastąpiła ponowna utrata kontaktu, spowodowana prawdopodobnie odparowaniem resztek gazu z wycieku, który udało się w końcu zlikwidować.
14.12.2005 oznajmiono, że przesunięto odlot ku Ziemi o ponad rok, by dać czas na rozwiązanie problemów z sondą.
W końcu stycznia 2006 udało się odzyskać kontakt z sondą.
06.03.2006 został nawiązany kontakt przez antenę o średnim zysku, dzięki wykorzystaniu silników jonowych do zmiany stabilizacji. Sonda znajdowała się wówczas ok. 13 000 km od Itokawy i oddalała się od niej z prędkością 3 m/s.
Od marca do kwietnia trwało wygrzewanie sondy, w celu odparowania wszelkim możliwych pozostałości paliwa chemicznego.
Od końca kwietnia do połowy maja trwały testy wszystkich czterech silników jonowych. Wykazały one, iż silniki B i D są w pełni sprawne. Test silnika C został przełożony na styczeń 2007, gdy sonda będzie znajdować się bliżej Słońca. Spowodowane jest to problemami z jego zasilaniem elektrycznym, które wykazuje wysoką wrażliwość na niską temperaturę. Ogólnie uważa się jednak silnik C za sprawny, a silnik A pozostaje w rezerwie. Do powrotu na Ziemię powinny wystarczyć dwa silniki. Zapas ksenonu został uznany za wystarczający do przeprowadzenia wszystkich manewrów.
W połowie maja udało się zredukować rotację sondy do pożądanej wartości jednego obrotu w ciągu 5 minut, co pozwala zachować stabilizację i jednocześnie utrzymywać reżim cieplny sondy w akceptowalnym zakresie przy jednoczesnym minimalnym zużyciu ksenonu.
W styczniu 2007 roku naładowanych zostało 7 baterii litowych, pozostałe 4 są trwale uszkodzone.
31.01.2007 pojemnik z próbką gruntu został umieszczony w lądowniku, który został zahermetyzowany.
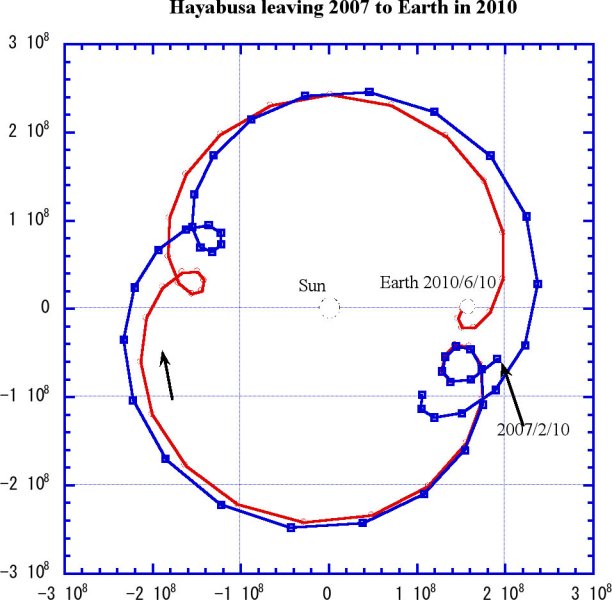
25.04.2007 o 05:30 włączono silnik jonowy - rozpoczął się powrót sondy na Ziemię. Silnik jonowy B z powodu zbyt wysokiego napięcia neutralizatora został wyłączony z użytku.
24.10.2007 zakończono pierwszy etap lotu napędowego. Sonda została wprowadzona w stan orientacji na Słońce za pomocą rotacji. Łącznie silniki sondy wygenerowały dV=1700 m/s podczas 31000 godzin pracy. Sonda pozostanie w locie beznapędowym do lutego 2009.
04.02.2009 o 02:35 ponownie uruchomiono napęd jonowy sondy. Będzie on funkcjonował do marca 2010, zmiana prędkości wyniesie około 400 m/s. Pozycja sondy w lutym 2009.
13.08.2009 z powodu błędnego wskazania czujnika systemu orientacji sonda weszła w reżim 'safe mode' (wyłączenie silnika jonowego, stabilizacja rotacyjna, komunikacja za pomocą anteny o średnim zysku). Po tygodniu wyjaśniło się, że przyczyną błędnego wskazania był niedobór energii elektrycznej (sonda znajduje się w afelium). Sonda obecnie powróciła do normalnego reżimu działania, jednak z restartem silnika postanowiono poczekać do chwili, gdy ilość uzyskiwanej energii elektrycznej zwiększy się w znaczącym stopniu.
26.09.2009 włączono napęd jonowy sondy.
04.11.2009 awarii uległ silnik jonowy D sondy (wysokie napięcie netralizatora), jednak postanowiono go zrestartować.
19.11.2009 postanowiono do napędu wykorzystać połączony sprawny neutralizator silnika A wraz ze źródłem zasilania w ksenon silnika B, a także oba pozostałe silniki (C i D).
13.01.2010 sonda osiągnęła orbitę, przechodzącą przez sferę oddziaływania grawitacyjnego Ziemi. Silniki będą pracować jeszcze do połowy marca, by zapewnić powrót na Ziemię w planowanym czasie i miejscu.
05.03.2010 silniki jonowe zostały wyłączone. Obecna orbita zbliża się do Ziemi na 160 000 km.
27.03.2010 zakończono serię manewrów, które spowodowały osiągnięcie orbity odległej od środka Ziemi o 20000 km (TCM-0).
01.05.2010 o 11:00 rozpoczęto trwający 64 godziny manewr naprowadzający TCM-1.
22.05.2010 o 22:37:28 rozpoczęto trwający powyżej 90 godzin manewr naprowadzający TCM-2 (dV=5 m/s).
03.06.2010 o 03:00 rozpoczęto manewr TCM-3, który zakończono 05.06.2010 o 04:44.
09.06.2010 o 03:30 rozpoczęto ostatni manewr korekcyjny TCM-4, który trwał 2,5 godziny.
13.06.2010 o 10:51 kapsuła odłączyła się od statku macierzystego. O 13:51 nastąpiło wtargnięcie obu obiektów do atmosfery, przy czym statek macierzysty spłonął. Około 14:10 nastąpiło lądowanie kapsuły na poligonie Woomera w Australii.
Strona główna | Witryna projektu Hayabusa | Sondy kosmiczne | NEO
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}